From March 27-29, 2023, the AAAI 2023 Spring Symposia featured the symposium „Socially Responsible AI for Well-being“ by Takashi Kido (Teikyo University, Japan) and Keiki Takadama (The University of Electro-Communications, Japan). This time the venue was exceptionally not Stanford University, but the Hyatt Regency SFO Airport. On March 28, Prof. Dr. Oliver Bendel presented the paper „Increasing Well-being through Robotic Hugs“, written by himself, Andrea Puljic, Robin Heiz, Furkan Tömen, and Ivan De Paola. It has now been published and can be downloaded via ceur-ws.org/Vol-3527/. From the abstract: „This paper addresses the question of how to increase the acceptability of a robot hug and whether such a hug contributes to well-being. It combines the lead author’s own research with pioneering research by Alexis E. Block and Katherine J. Kuchenbecker. First, the basics of this area are laid out with particular attention to the work of the two scientists. The authors then present HUGGIE Project I, which largely consisted of an online survey with nearly 300 participants, followed by HUGGIE Project II, which involved building a hugging robot and testing it on 136 people. At the end, the results are linked to current research by Block and Kuchenbecker, who have equipped their hugging robot with artificial intelligence to better respond to the needs of subjects.“ More information on the conference via aaai.org/conference/spring-symposia/sss23/.
From March 27-29, 2023, the AAAI 2023 Spring Symposia will feature the symposium „Socially Responsible AI for Well-being“ by Takashi Kido (Teikyo University, Japan) and Keiki Takadama (The University of Electro-Communications, Japan). The venue is usually Stanford University. For staffing reasons, this year the conference will be held at the Hyatt Regency in San Francisco. On March 28, Prof. Dr. Oliver Bendel will present the paper „Increasing Well-being through Robotic Hugs“, written by himself, Andrea Puljic, Robin Heiz, Furkan Tömen, and Ivan De Paola. From the abstract: „This paper addresses the question of how to increase the acceptability of a robot hug and whether such a hug contributes to well-being. It combines the lead author’s own research with pioneering research by Alexis E. Block and Katherine J. Kuchenbecker. First, the basics of this area are laid out with particular attention to the work of the two scientists. The authors then present HUGGIE Project I, which largely consisted of an online survey with nearly 300 participants, followed by HUGGIE Project II, which involved building a hugging robot and testing it on 136 people. At the end, the results are linked to current research by Block and Kuchenbecker, who have equipped their hugging robot with artificial intelligence to better respond to the needs of subjects.“ More information via aaai.org/conference/spring-symposia/sss23/.
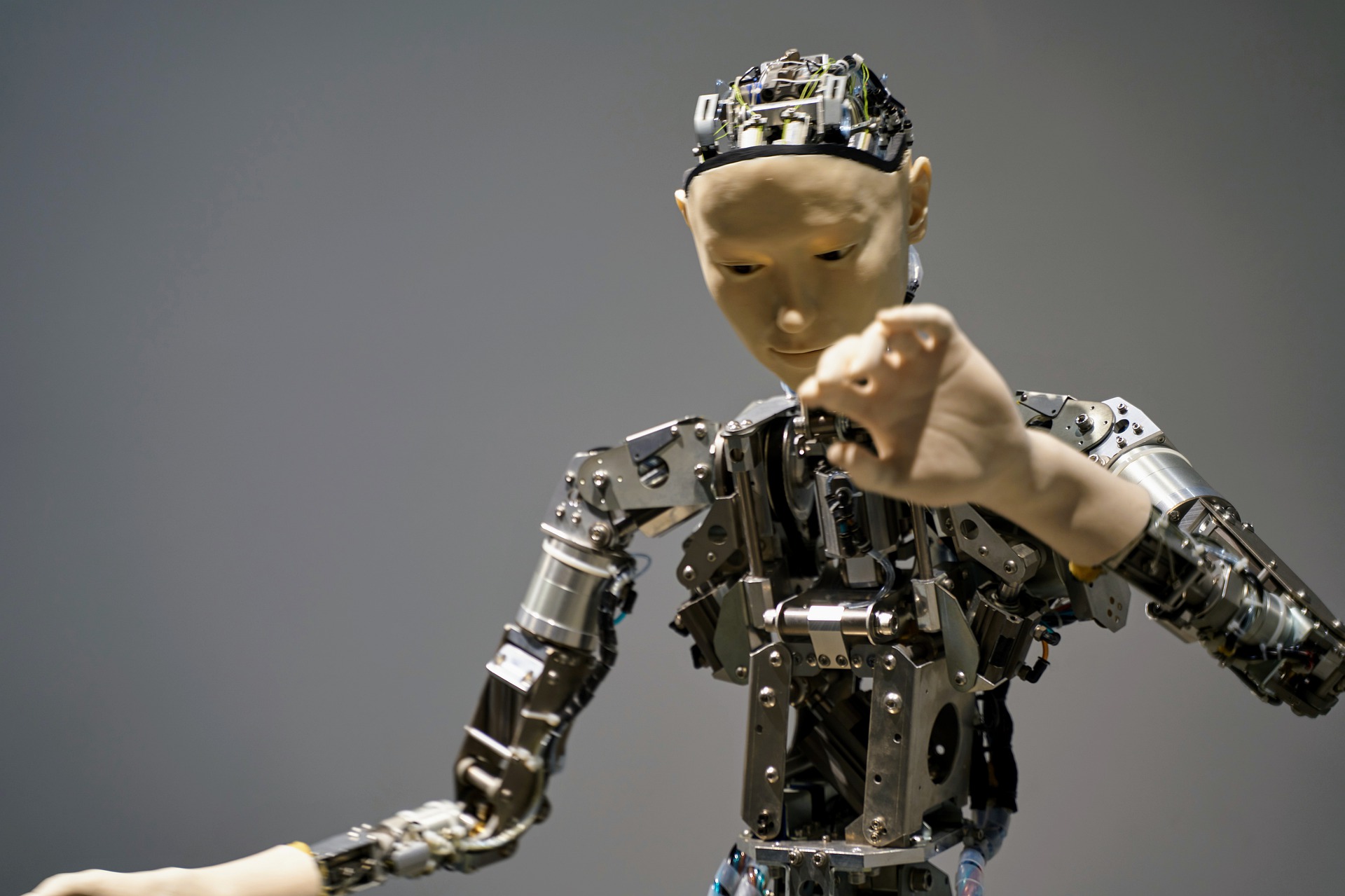
Fig.: HUGGIE, Teddy, and the team (without Oliver Bendel)
Zeynep Karagöz (Robotel Türkiye) will give a talk on March 20, 2023 on the topic „How to make a difference: Free 3D printed devices for earthquake victims“. She graduated from MSÜ – Architecture and co-founded KOMA Architecture in 2001. With Robotel Türkiye, „she started making 3D printed mechanical hands for children with hand deformation who do not have access to prosthetics“ (Website Orient-Institut Istanbul). On 6 February 2023, a M7.8 earthquake struck southern and central Turkey as well as northern and western Syria. In her talk, Zeynep Karagöz will focus on the efforts of her NGO in the Turkish earthquake region. Her information text states: „This lecture offers an opportunity to learn more about our work at Robotel Türkiye, which I am heading, in providing free 3D-printed prostheses for children who lack access to such devices. I will focus the impact it has had on the lives of those we serve. Our primary focus has been on providing mechanical hands, arms, and fingers to children, although we have also served adults upon request. However, recent events have led us to extend our services to include shoulder mechanisms, adult models, and orthotic prosthesis devices. … I will discuss the impact of our work in the region and the urgent need for volunteers and financial support to continue our efforts.“ (Website Orient-Institut Istanbul) The event is sponsored by Orient-Institut Istanbul, NYU Center for Disability Studies, and Humboldt-Universität zu Berlin. Registration for the webinar is available here.
As part of the AAAI 2023 Spring Symposia in San Francisco, the symposium „Socially Responsible AI for Well-being“ is organized by Takashi Kido (Teikyo University, Japan) and Keiki Takadama (The University of Electro-Communications, Japan). The paper „Increasing Well-being and Health through Robotic Hugs“ by Oliver Bendel, Andrea Puljic, Robin Heiz, Furkan Tömen, and Ivan De Paola was accepted. The talk will take place between March 26 and 29, 2023 at Hyatt Regency, San Francisco Airport. The symposium website states: „For our happiness, AI is not enough to be productive in exponential growth or economic/financial supremacies but should be socially responsible from the viewpoint of fairness, transparency, accountability, reliability, safety, privacy, and security. For example, AI diagnosis system should provide responsible results (e.g., a high-accuracy of diagnostics result with an understandable explanation) but the results should be socially accepted (e.g., data for AI (machine learning) should not be biased (i.e., the amount of data for learning should be equal among races and/or locations). Like this example, a decision of AI affects our well-being, which suggests the importance of discussing ‚What is socially responsible?‘ in several potential situations of well-being in the coming AI age.“ (Website AAAI) According to the organizers, the first perspective is „(Individually) Responsible AI“, which aims to clarify what kinds of mechanisms or issues should be taken into consideration to design Responsible AI for well-being. The second perspective is „Socially Responsible AI“, which aims to clarify what kinds of mechanisms or issues should be taken into consideration to implement social aspects in Responsible AI for well-being. More information via www.aaai.org/Symposia/Spring/sss23.php#ss09.
As part of the AAAI 2023 Spring Symposia in San Francisco, the symposium „Socially Responsible AI for Well-being“ is organized by Takashi Kido (Teikyo University, Japan) and Keiki Takadama (The University of Electro-Communications, Japan). The paper „How Can Bar Robots Enhance the Well-being of Guests?“ by Oliver Bendel and Lea K. Peier was accepted. The talk will take place between March 26 and 29, 2023 at Hyatt Regency, San Francisco Airport. The symposium website states: „For our happiness, AI is not enough to be productive in exponential growth or economic/financial supremacies but should be socially responsible from the viewpoint of fairness, transparency, accountability, reliability, safety, privacy, and security. For example, AI diagnosis system should provide responsible results (e.g., a high-accuracy of diagnostics result with an understandable explanation) but the results should be socially accepted (e.g., data for AI (machine learning) should not be biased (i.e., the amount of data for learning should be equal among races and/or locations). Like this example, a decision of AI affects our well-being, which suggests the importance of discussing ‚What is socially responsible?‘ in several potential situations of well-being in the coming AI age.“ (Website AAAI) According to the organizers, the first perspective is „(Individually) Responsible AI“, which aims to clarify what kinds of mechanisms or issues should be taken into consideration to design Responsible AI for well-being. The second perspective is „Socially Responsible AI“, which aims to clarify what kinds of mechanisms or issues should be taken into consideration to implement social aspects in Responsible AI for well-being. More information via www.aaai.org/Symposia/Spring/sss23.php#ss09.
Der vierte und letzte Tag der Robophilosophy 2022 wurde eröffnet mit einem Vortrag von Catrin Misselhorn („Three Ethical Arguments against Killer Robots“). Sie stellte u.a. die Arbeit von Ronald C. Arkin vor und übte Kritik daran. Ein Workshop und drei Sessions schlossen sich an. In Session 18 („Robots in Elderly Care II“) sprach zunächst Stefanie Baisch („Elders‘ Expectations and Experiences of Having a Companion-Type Social Robot“, mit Thorsten Kolling), dann Rajitha Ramanayake („A Small Set of Ethical Challenges For Elder-care Robots“, mit Vivek Nallur). Session 19 („Robots at Work“) wurde von Valeria Martino („Trusting Workers: Information and Sociability in the Digital Age“), Rua Williams („All Robots Are Disabled“) sowie Anna Dobrosovestnova und Tim Reinboth („Mapping Ambiguities of Helping Commercial Delivery Robots“) bestritten. Tatsächlich sind sowohl autonome als auch ferngesteuerte Transportroboter immer wieder auf Hilfe angewiesen, etwa wenn sie feststecken. Nach dem Lunch bildete die Panel Discussion, geleitet von Robert Sparrow, den Abschluss. Der australische Philosoph fragte Johanna Seibt, was Philosophen besser machen könnten. Sie forderte diese auf, zu den Robotikkonferenzen zu gehen und von ihnen zu lernen. Umgekehrt ermahnte sie die Robotiker, die Leistung der Philosophen zu achten. Zahlreiche weitere Statements und Kommentare folgten. Die Robophilosophy hat sich erneut als führende Veranstaltung für Soziale Robotik behauptet. Weitere Informationen zur Konferenz über cas.au.dk/en/robophilosophy/conferences/rpc2022.
Abb.: Robert Sparrow, Johanna Seibt, Catrin Misselhorn und Paula Sweeney
On February 18, 2022, the Dagstuhl Report „Conversational Agent as Trustworthy Autonomous System (Trust-CA)“ was published. Editors are Effie Lai-Chong Law, Asbjørn Følstad, Jonathan Grudin, and Björn Schuller. From the abstract: „This report documents the program and the outcomes of Dagstuhl Seminar 21381 ‚Conversational Agent as Trustworthy Autonomous System (Trust-CA)‘. First, we present the abstracts of the talks delivered by the Seminar’s attendees. Then we report on the origin and process of our six breakout (working) groups. For each group, we describe its contributors, goals and key questions, key insights, and future research. The themes of the groups were derived from a pre-Seminar survey, which also led to a list of suggested readings for the topic of trust in conversational agents. The list is included in this report for references.“ (Abstract Dagstuhl Report) The seminar, attended by scientists and experts from around the world, was held at Schloss Dagstuhl from September 19-24, 2022. The report can be downloaded via drops.dagstuhl.de/opus/volltexte/2022/15770/.
Fig.: The on-site group (Photo: Schloss Dagstuhl – LZ GmbH)
The paper „The SPACE THEA Project“ by Martin Spathelf and Oliver Bendel was accepted at the AAAI 2022 Spring Symposia (Stanford University). The two authors will present it at the end of March 2022 at the symposium „How Fair is Fair? Achieving Wellbeing AI“. From the abstract: „In some situations, no professional human contact can be available. Accordingly, one remains alone with one’s problems and fears. A manned Mars flight is certainly such a situation. A voice assistant that shows empathy and assists the astronauts could be a solution. In the SPACE THEA project, a prototype with such capabilities was developed using Google Assistant and Dialogflow Essentials. The voice assistant has a personality based on characteristics such as functional intelligence, sincerity, creativity, and emotional intelligence. It proves itself in seven different scenarios designed to represent the daily lives of astronauts, addressing operational crises and human problems. The paper describes the seven scenarios in detail, and lists technical and conceptual foundations of the voice assistant. Finally, the most important results are stated and the chapters are summarized.“ More information about the AAAI 2022 Spring Symposia is available here.
How can you make social robots out of simple, soft shapes and objects, i.e. robots for interacting with people and animals? Under the supervision of Prof. Dr. Oliver Bendel, Vietnamese student Nhi Hoang Yen Tran and her fellow student Thang Vu Hoang investigated this question in the project „Simple, Soft Social Robots“ at the FHNW School of Business. They used Hugvie from Hiroshi Ishiguro Laboratories as the basis for their considerations – these labs are most famous for the Geminoid and for Erica. But hugging robots like Telenoid also come from them. The latest product from this series is Hugvie. A pocket for a smartphone is attached to its head. People who are far away from each other can talk to each other and have the impression of hugging and feeling each other. But what else can be done with Hugvie and similar forms? The two students have come up with eleven suggestions. A video explains five of them. Two of them are variants of Hugvie. With their result, the two students have received the highest performance in the bachelor thesis among all graduates of BSc International Management in 2021.
Simple, soft shapes are everywhere. In our home environment you can find pillows, blankets, balls, bottles, clothes, etc. Robots are often expensive and complex. But couldn’t they be thought of in a completely different way? How could social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The tenth proposal is Sleeping Hugvie (go here to the previous). The normal Hugvie is used to communicate with distant people, giving the feeling of sensing them. You talk to them and hug the robot. In the process, you apparently feel the other person’s heartbeat via the integrated element. The Sleeping Hugvie has a different function. It is supposed to make it easier for babies to fall asleep. Its shape can be adjusted. The integrated element can also simulate the heartbeat – of the mother, for example. Parents can talk to the child or play soothing music (or white noise) via a speaker. A camera for observing the child is optional. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Sleeping Hugvie (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The ninth proposal is RoofBot (go here to the previous). RoofBot was inspired by FLORABORG. FLORABORG is a concept for a plant cyborg from 2015 by Oliver Bendel. RoofBot detects via sensors if there is too much or too little sun and if it is too hot or too cold. When it detects that the plants are thirsty, it gives them water. It can also provide them with shade via a flexible roof. RoofBot, unlike the other proposals, is not necessarily a good example of simple, soft social robots, but it is an interesting variant of FLORABORG, which leaves the plant itself untouched. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: RoofBot (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
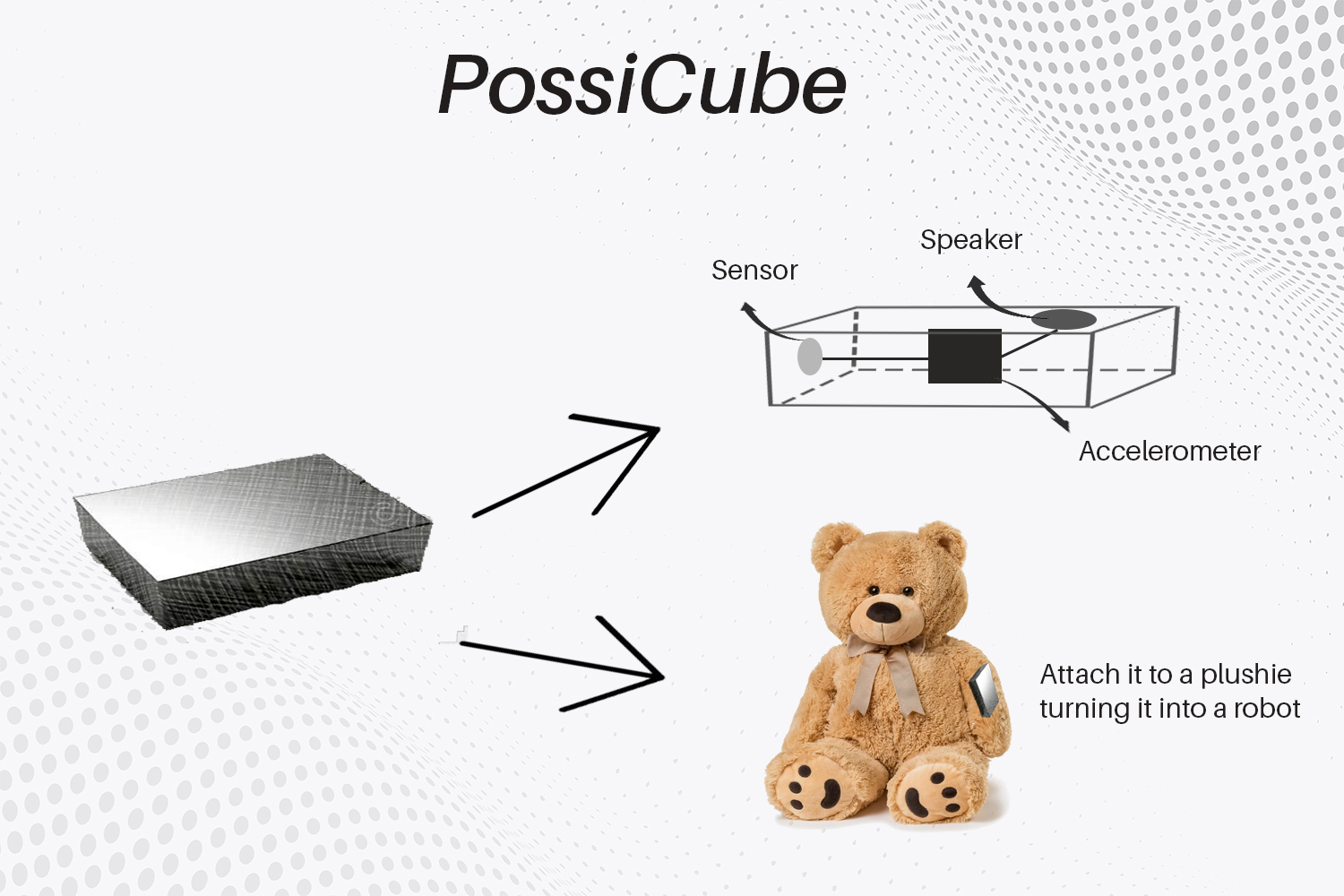
Simple, soft shapes are everywhere. In our home environment you can find pillows, blankets, balls, bottles, clothes, etc. Robots are often expensive and complex. But couldn’t they be thought of in a completely different way? How could social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The sixth proposal is PossiCube, the cube of possibilities (go here to the previous). Possicube is an element that can be integrated into any simple soft shape. It transforms them into a simple social robot. For example, thanks to PossiCube, a teddy bear can perceive its environment and react to it with sounds or sentences. It would be ideal to be able to select different categories with different models. This would make it possible to robotize things in a simple and appropriate way. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Possicube (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
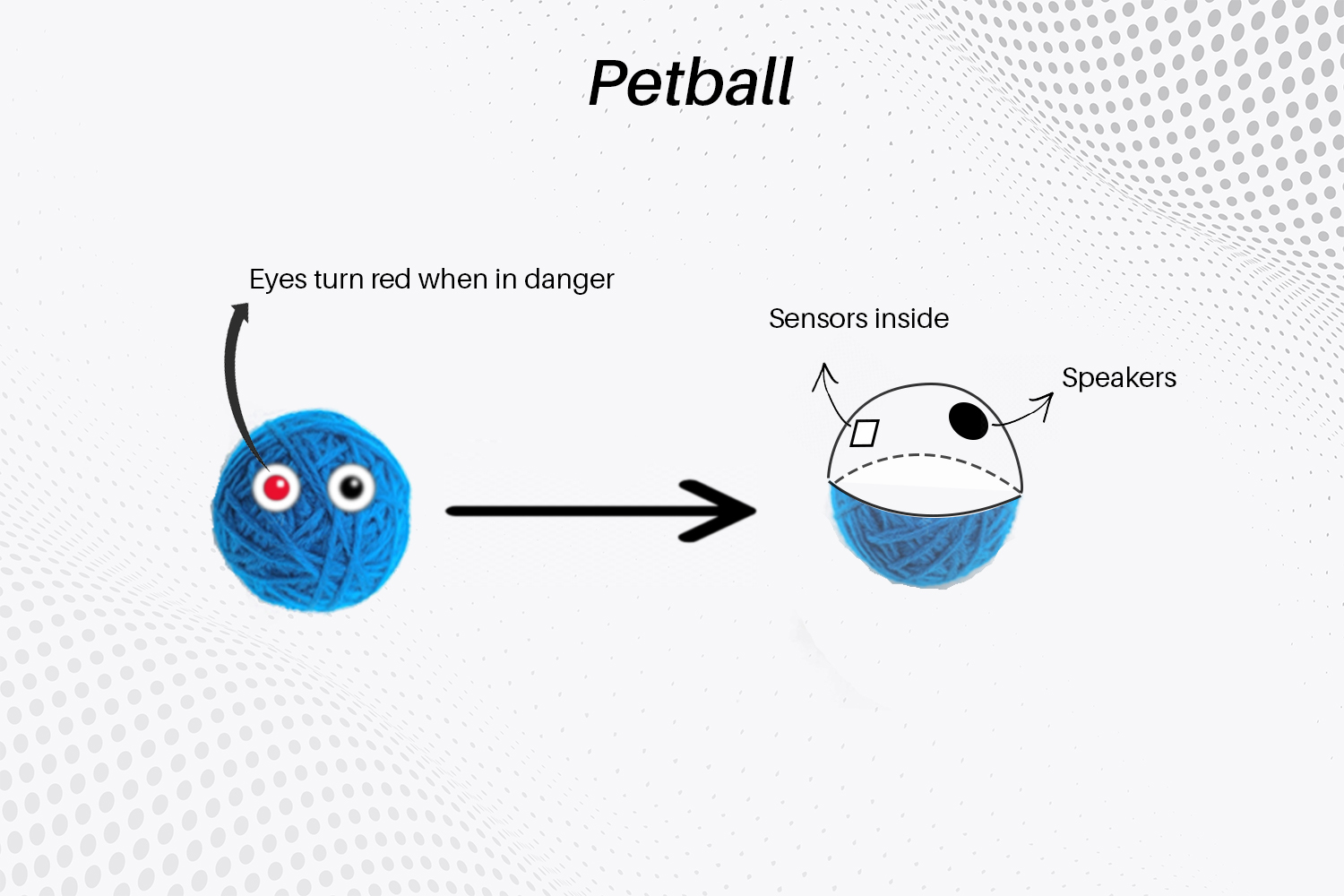
Simple, soft shapes are everywhere. In our home environment are pillows, blankets, balls, bottles, clothes, etc. Robots are often expensive and complex. But couldn’t they be thought of in a completely different way? How could social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The fifth proposal is Petball, a play ball for pets, especially dogs and cats (go here to the previous). It entertains them and keeps them moving. It can detect if an animal strays too far from the house and sound the alarm if necessary. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Petball (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
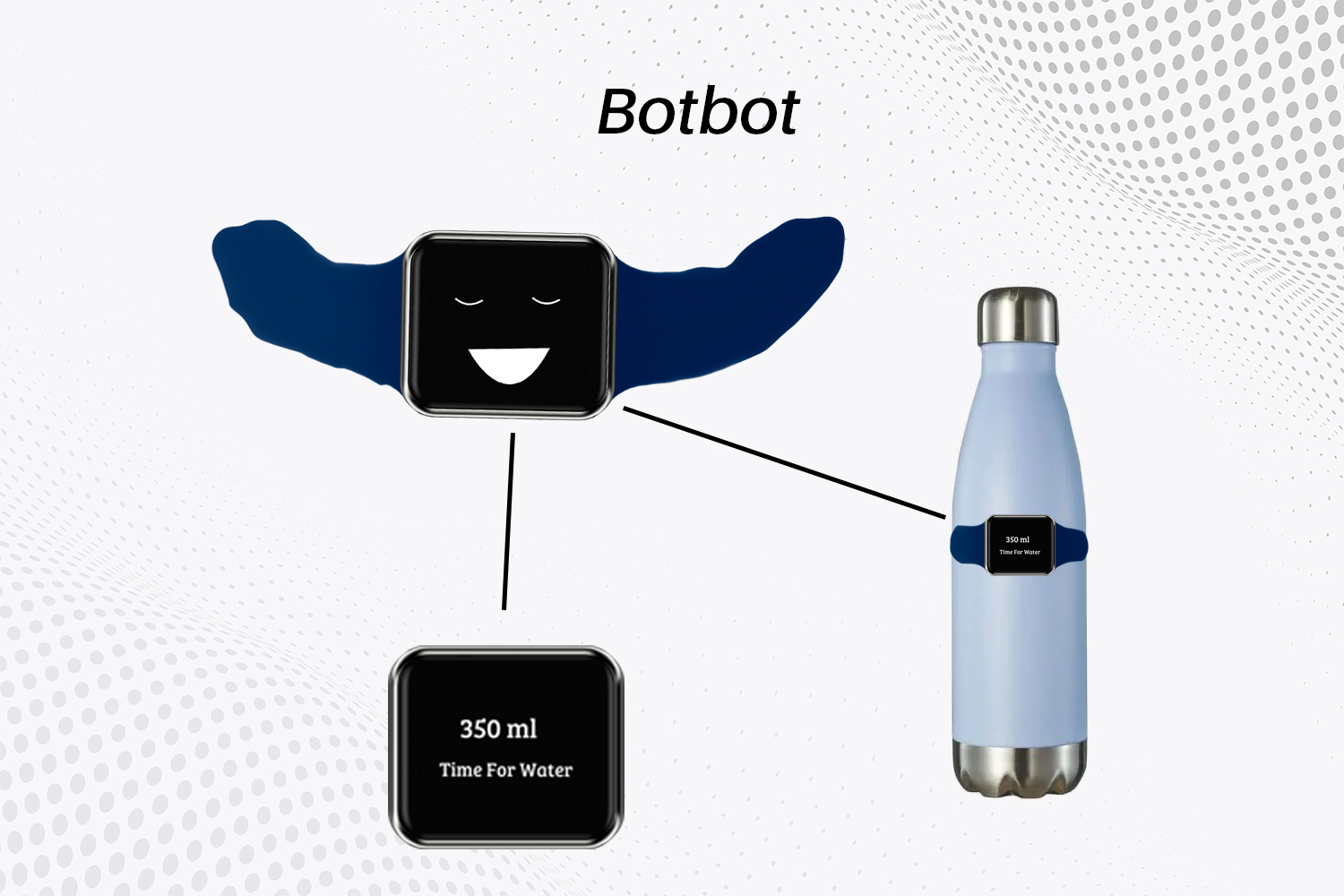
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The second proposal is a kind of clock (go here to the previous), which is placed around the neck of a bottle (at least a PET bottle would be a simple, soft form). Botbot, as it is called (from „bottle“ and „robot“), reminds the user to drink something. The robot can determine how much is left in the bottle and how much one has already drunk. Botbot can output text and has simple miming capabilities. On the one hand, one can be bothered by the pedagogical function. On the other hand, this function could prove to be really useful. The fact is that many people drink too little and get sick as a result. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Botbot (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, 23-year-old students Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City (Vietnam) have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The first is a pillow to which a tail has been added. Its name is Petanion. The tail could move like the tail of a cat or dog. In addition, the pillow could make certain sounds. It would be optimal if the tail movements were based on the behavior of the user. Thus, as desired, a social robot is created from a simple, soft form, in this case a pet substitute. Petanion is soft and cute and survives a long time. It can also be used if one has certain allergies or if there is not enough space or money in a household for a pet. Last but not least, the ecological balance is probably better – above all, the robot does not eat animals that come from factory farming. The inspiration may have been Qoobo, a pillow with a tail, designed to calm and to „heal the heart“. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Petanion (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
SPACE THEA was developd by Martin Spathelf at the School of Business FHNW from April to August 2021. The client and supervisor was Prof. Dr. Oliver Bendel. The voice assistant is supposed to show empathy and emotions towards astronauts on a Mars flight. Technically, it is based on Google Assistant and Dialogflow. The programmer chose a female voice with Canadian English. SPACE THEA’s personality includes functional and emotional intelligence, honesty, and creativity. She follows a moral principle: to maximize the benefit of the passengers of the spacecraft. The prototype was implemented for the following scenarios: conduct general conversations; help the user find a light switch; assist the astronaut when a thruster fails; greet and cheer up in the morning; fend off an insult for no reason; stand by a lonely astronaut; learn about the voice assistant. A video on the latter scenario is available here. Oliver Bendel has been researching conversational agents for 20 years. With his teams, he has developed 20 concepts and artifacts of machine ethics and social robotics since 2012.
Xiaomi has unveiled CyberDog, a four-legged robot that could be a competitor to Sony’s AIBO. According to the Chinese company, it is calibrated with servo motors that translates into great speed, agility, and a wide range of motion. It is able to conduct complicated actions such as backflips. „To fully model biological organisms, CyberDog is equipped with 11 high-precision sensors which provide instant feedback to guide its movements. This includes touch sensors, cameras, ultrasonic sensors, GPS modules, and more, giving the CyberDog enhanced capability to sense, analyze, and interact with its environment.“ (Mi Blog, 10 August 2021) Unlike AIBO, CyberDog looks rather frightening. This is because it does not have an actual head. In this it is comparable to Spot from Boston Dynamics. Nevertheless, it is intended to function as a pet substitute. „To add to its pet-like nature, users can use voice assistants to command and control CyberDog by setting a wake word, or simply use its accompanying remote and smartphone app. CyberDog can be called on for the most unique tasks, and the ways in which it can be interacted with holds unforetold possibilities.“ (Mi Blog, 10 August 2021) The future will show whether users want to become friends with CyberDog.
With Hugvie and Somnox Sleep Robot, researchers and companies has made it clear that it is possible to build simple, soft social robots that have a certain utility and impact. This raises hopes for social robotics, which is currently showing some progress, but is still developing slowly. Materials such as rubber and plastic can be used to make simple, soft social robots. These materials can be combined with existing devices such as smartphones and tablets on which you run certain applications, or with simple sensors and electronic components. The project or thesis, announced by Oliver Bendel at the School of Business FHNW, will first do research on the basics of simple, soft social robots. The work of Hiroshi Ishiguro and Alexis Block (with Katherine J. Kuchenbecker) will be included. Then, examples of implementation forms are mentioned and sketched. Their purpose and benefits are presented, as well as possible areas of application. One example is to be implemented, whereby speech abilities and sounds can be an option as well as vibration and electrical impulses. The reference to applications in the household, in public space or in the commercial sector should be established. The project will start in March 2021.
The symposium „Applied AI in Healthcare: Safety, Community, and the Environment“ will be held within the AAAI Spring Symposia on March 22-23, 2021. One of the presentations is titled „Care Robots with Sexual Assistance Functions“. Author of the paper is Prof. Dr. Oliver Bendel. From the abstract: „Residents in retirement and nursing homes have sexual needs just like other people. However, the semi-public situation makes it difficult for them to satisfy these existential concerns. In addition, they may not be able to meet a suitable partner or find it difficult to have a relationship for mental or physical reasons. People who live or are cared for at home can also be affected by this problem. Perhaps they can host someone more easily and discreetly than the residents of a health facility, but some elderly and disabled people may be restricted in some ways. This article examines the opportunities and risks that arise with regard to care robots with sexual assistance functions. First of all, it deals with sexual well-being. Then it presents robotic systems ranging from sex robots to care robots. Finally, the focus is on care robots, with the author exploring technical and design issues. A brief ethical discussion completes the article. The result is that care robots with sexual assistance functions could be an enrichment of the everyday life of people in need of care, but that we also have to consider some technical, design and moral aspects.“ More information about the AAAI Spring Symposia is available at aaai.org/Symposia/Spring/sss21.php.
Hanson Robotics is most famous for Sophia. Now the Hong Kong-based company is preparing to launch a new robot. According to the website, Little Sophia is the little sister of Sophia and the newest member of the Hanson Robotics family. „Little Sophia can walk, talk, sing, play games and, like her big sister, even tell jokes! She is a programmable, educational companion for kids, that will inspire children to learn about coding, AI, science, technology, engineering and math through a safe, interactive, human-robot experience. Unlike most educational toys designed by toy companies, Little Sophia is crafted by the same renowned developers, engineers, roboticists and AI scientists that created Sophia the Robot.“ (Website Hanson Robotics) In photos, Little Sophia looks even creepier than Sophia. In videos, this impression is no different. What is special about her is that she has a wide range of facial expressions. It must be emphasized that, as in the case of Sophia, this is not a virtual face, but a real one. From a technical point of view, this is without a doubt an interesting product.
Springer launches a new journal entitled „AI and Ethics“. This topic has been researched for several years from various perspectives, including information ethics, robot ethics (or roboethics) and machine ethics. From the description: „AI and Ethics seeks to promote informed debate and discussion of the ethical, regulatory, and policy implications that arise from the development of AI. It will focus on how AI techniques, tools, and technologies are developing, including consideration of where these developments may lead in the future. The journal will provide opportunities for academics, scientists, practitioners, policy makers, and the public to consider how AI might affect our lives in the future, and what implications, benefits, and risks might emerge. Attention will be given to the potential intentional and unintentional misuses of the research and technology presented in articles we publish. Examples of harmful consequences include weaponization, bias in face recognition systems, and discrimination and unfairness with respect to race and gender.“ (Springer Website) More information via www.springer.com/journal/43681.
One year ago, The Robot Report reported that Anki’s little robots might be making a comeback. Digital Dream Labs in Pittsburgh acquired the patents, trademarks, and domain. The start-up company „is planning to revive and manufacture more units of each product in the following order: Overdrive, Cozmo, Vector“ (The Robot Report, 26 December 2019). Digital Dream Labs founder H. Jacob Hanchar told The Robot Report „the goal is to have all three products available for purchase for Christmas 2020“ (The Robot Report, 26 December 2019). Now it seems that pre-orders of Cozmo 2.0 are possible: „Cozmo is a fun, educational toy robot that you can be used to teach children the basics of coding. Whether he is performing tricks, exploring his environment or teaching coding, Cozmo is always full of personality. Pre-order your new Cozmo today for delivery as early as May 15th.“ (Website Digital Dream Labs) Cozmo and his friends belong to the best social robots that the industry has ever produced. What is special about Cozmo is the many emotions it can show (but of course doesn’t have). It also has face recognition and a night vision device. More information at www.digitaldreamlabs.com.









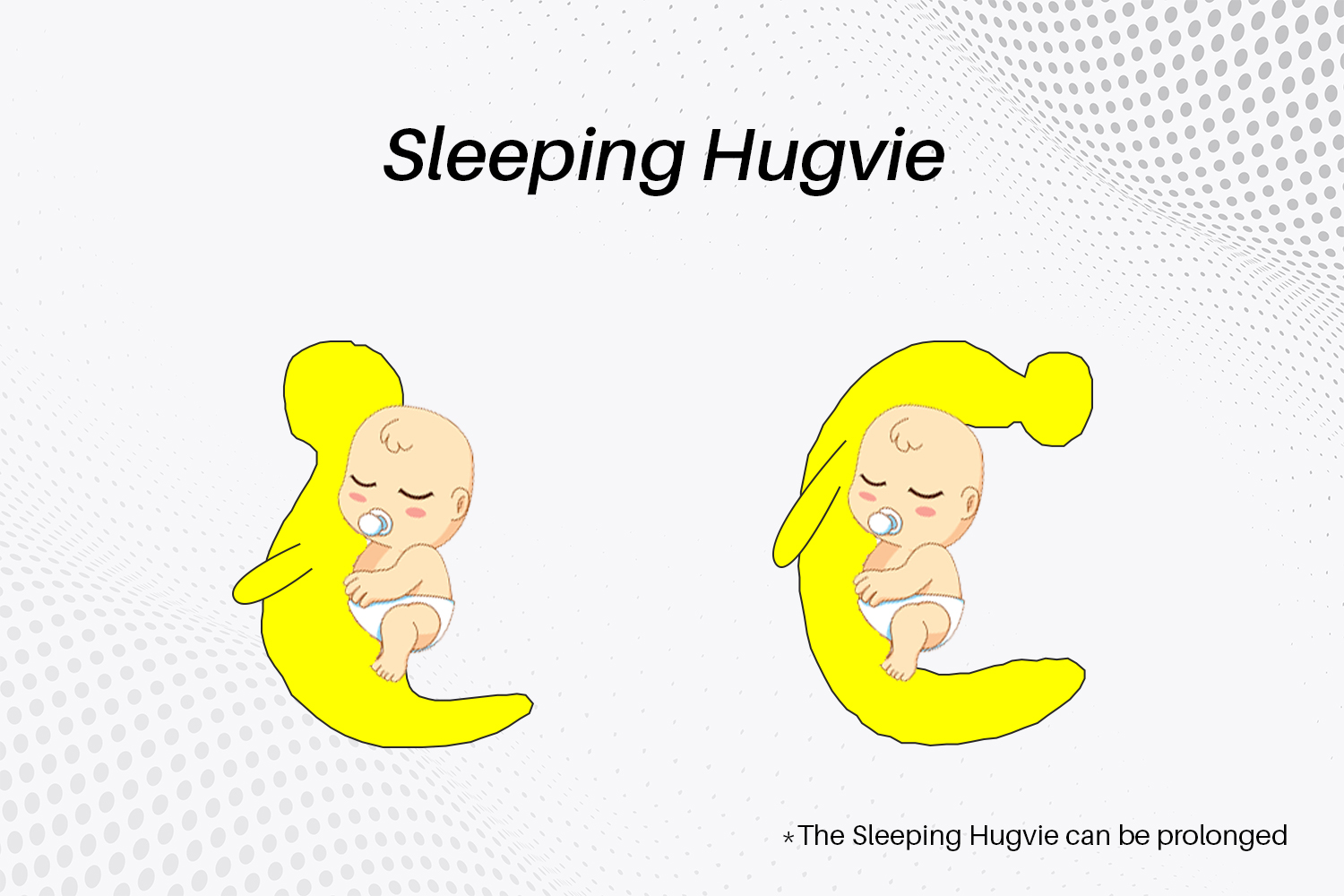
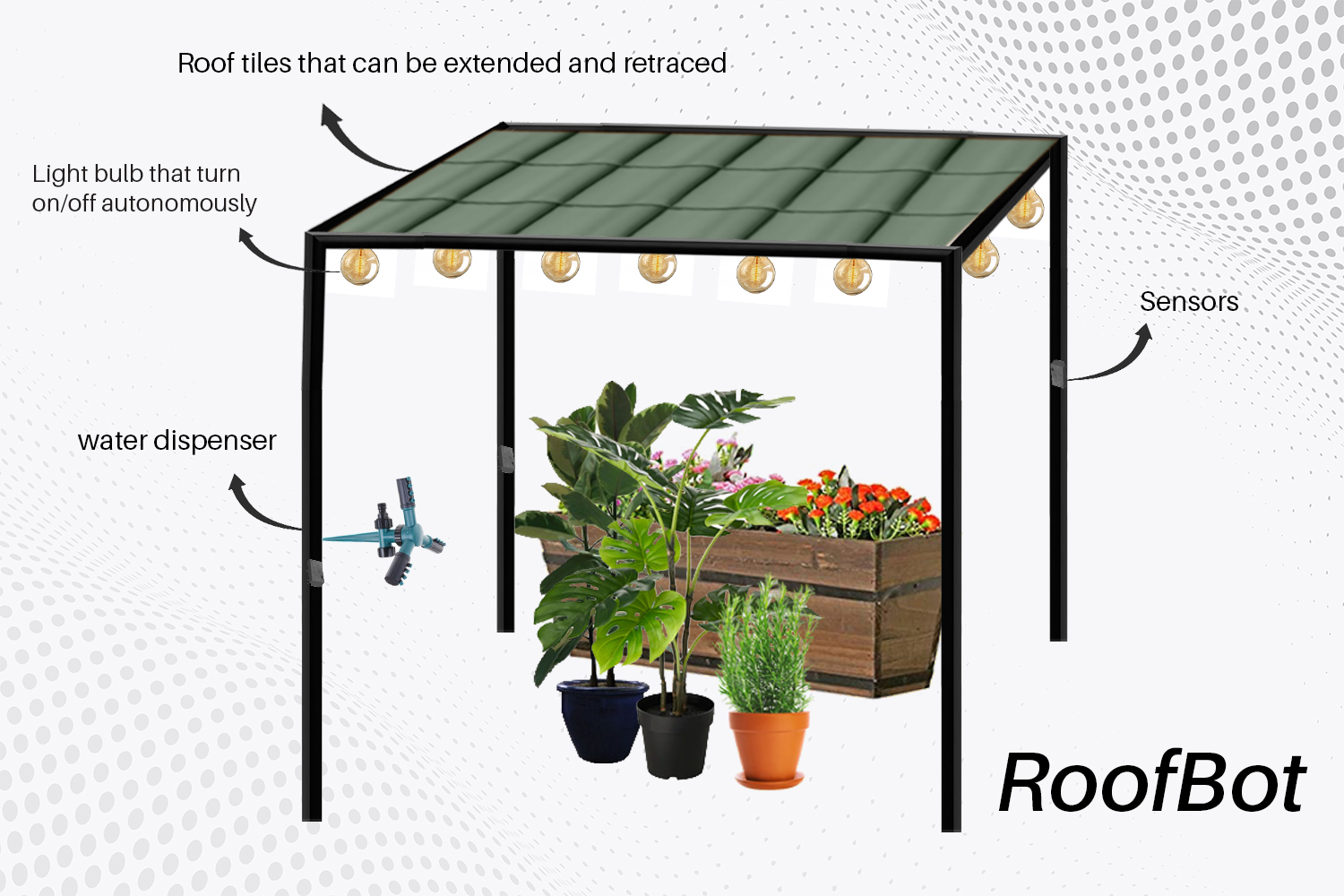 Fig.: RoofBot (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
Fig.: RoofBot (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)